
一架实验性无人机解决了无人机手臂妨碍其功能的问题。该模型的手臂可以根据需要被动地向下折叠。
已经有四轴飞行器可以通过使用电动执行器在飞行过程中重新配置自己。这为模型增加了另一个复杂的电子设置。
因此,加州大学伯克利分校的高性能机器人实验室(HiPeRLab)的科学家们开发了一种使用非驱动铰链的空中可重构四轴飞行器。它只需要重力或反向推力,就能在需要时使每只手臂下垂。
这种设置使得一些操作成为可能。如果水平飞行的无人机需要挤过一个狭窄的垂直开口,它就会逆转相反的两个手臂的推力方向,导致它们都向下折叠。因为这些臂的推力轴相互抵消(无人机的身体是矩形的,而不是方形的),它们产生的偏航力矩抵消了其他两个臂产生的偏航力矩。
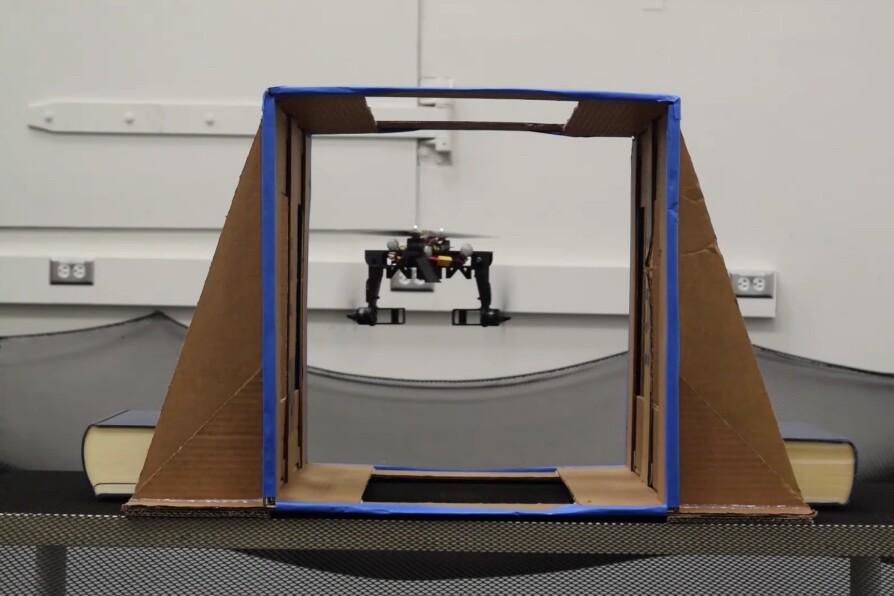
因此,车辆可以顺利、稳定地通过该开口。因为两个向下折叠的手臂是相互挤压的,它们也可以用来抓住一个平面盒子,从任何一边捏它。然后,这个盒子可以在另一个地方被抬起、飞行和释放
此外,如果盘旋的无人机需要下降下来通过一个狭窄的水平开口,它的四个螺旋桨都扭转了推力的方向,使所有四个臂都向下折叠。当直升机进行自由落体运动时,它的垂直方向是通过改变相对于另一个支柱的推力来控制的。一旦它通过了开口,推力就会恢复到原来的状态。这将导致所有的手臂再次上升,使四轴飞行器在继续前进前恢复盘旋。
最后,如果无人机需要静坐,它可以降落在这条线上,然后关闭所有的螺旋桨。这使得它的四个臂都下降,使直升机的质心低于接触点,保持在电线上的平衡。
空中可重构四轴飞行器是在2019年的论文发表在杂志上IEEE Xplore.该研究由博士生Nathan Bucki、助理教授Mark W. Mueller和研究员Jerry Tang领导。

{kind=link}