
不可能把大量机械机器人的图片,在单调和移动缓慢,缓慢的运动。温柔的自动化爱好者,另一方面,设想独立机器组成的弹性元素愉快的联系,更与人类的手指比r2 - d2和罗比机器人。这种模式现在被教授爱德华·阿德尔森和他的感性追求科学组麻省理工学院计算机科学和人工智能实验室(权力)。阿德尔森和桑德拉Liu机械工程博士生做成的,已经创建了一个机器人独特的把握“GelSight鳍条”指尖,足够灵活来把握项目以同样的方式作为一个人的手。
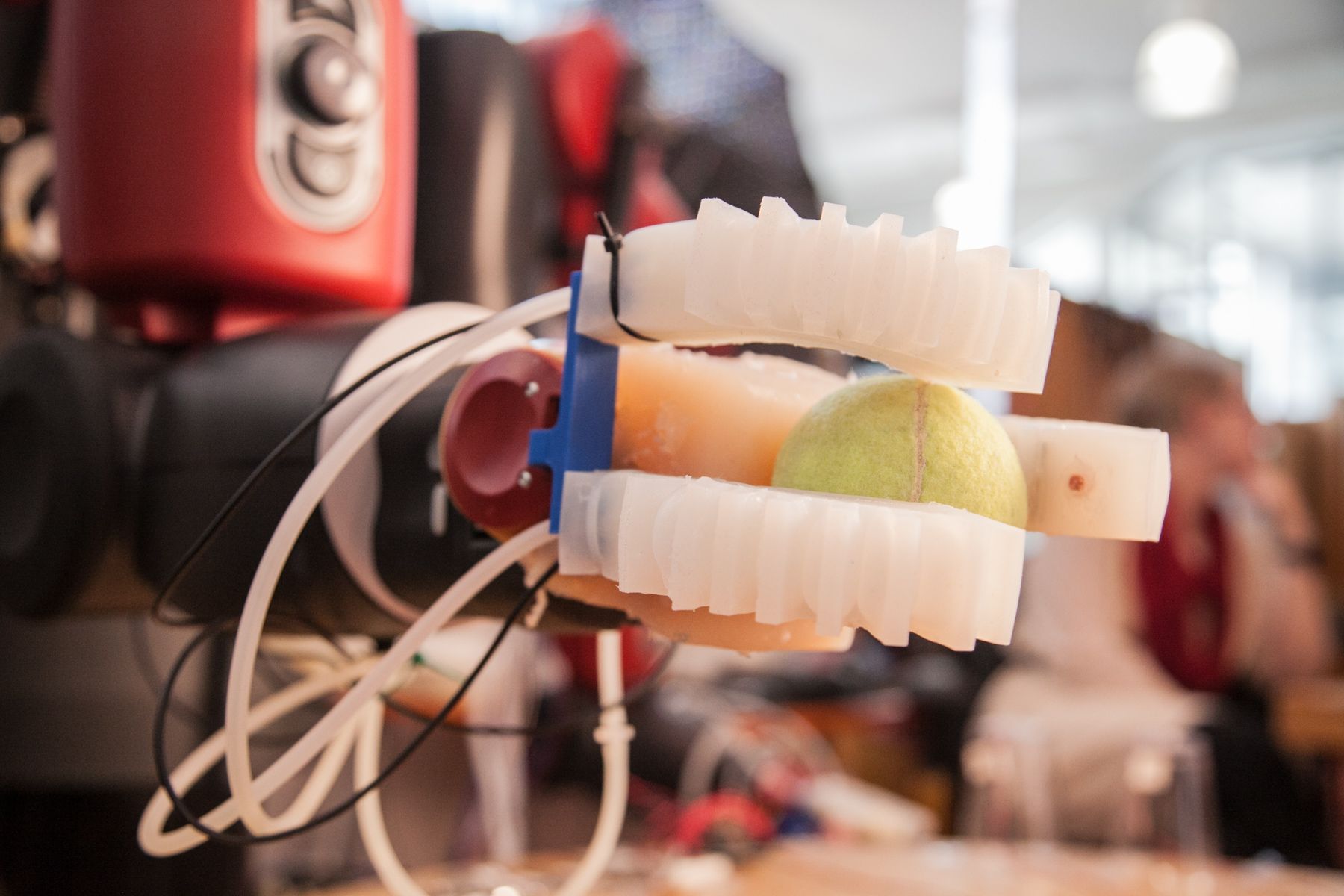
爪是由两个可弯曲手指鳍条符合任何他们接触的轮廓。的手指灵活的塑料材料建造生产使用3 d打印机,这是非常典型的。相比之下,最柔软的机械爪的手指功能支持cross-struts沿着他们的内部,但刘,阿德尔森挖下来里面容纳他们的相机和其他传感元素。相机安装在减震基础由发光二极管一端点燃的纸板剪室。摄像机安装在一层“感应”贴在一个硅胶垫丙烯酸的薄层物质。丙烯酸表连接到塑料手指的极端边缘部分室内腔。当用户触摸任何东西,周围的手指会流畅的褶皱,合并成曲线。镜头和相关计算技术可以检查的整体几何项,它的位置在空间、波状,每个手指施加的力通过计算硅和丙烯酸表如何合同在此相遇。在一个操作中只有一两个手指的“sensorized,”刘和阿德尔森把钳子。他们的发明成功地处理一个塑料草莓、迷你螺丝起子,球梅森罐,丙烯酸树脂漆瓶,一瓶香槟。
触觉传感归因于低成本零部件如相机,凝胶,led技术。使用技术,如GelSight,刘认为“可能是可行的开发探测器,都是实用和便宜的。“最低,这是一个目标的她和其他人在实验室正试图实现。GelSight鳍线提供了一个广泛的可能的用途,但刘和阿德尔森是第一个关注某些改进。Wenzhen元,卡内基梅隆大学机器人研究所助理教授说;“传感用软机器人的证明问题由于安装探测器的难度,通常硬,柔软的身体。这项研究提供了一个简单的补救困难。”
/https://tf-cmsv2-smithsonianmag-media.s3.amazonaws.com/filer/fc/73/fc737a61-0671-4691-91de-e56305a3f2f1/robotmanipulation1600x600.jpg)

{kind=link}